

Swarm Robots

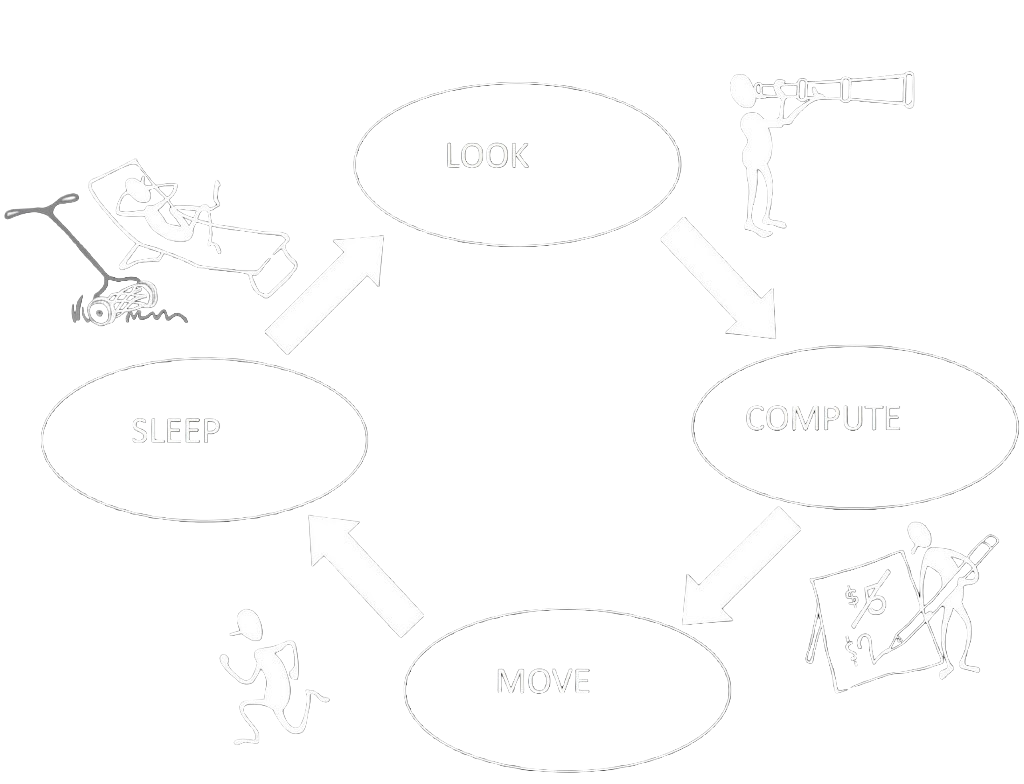
LCM Execution Cycle
Luminous Robots
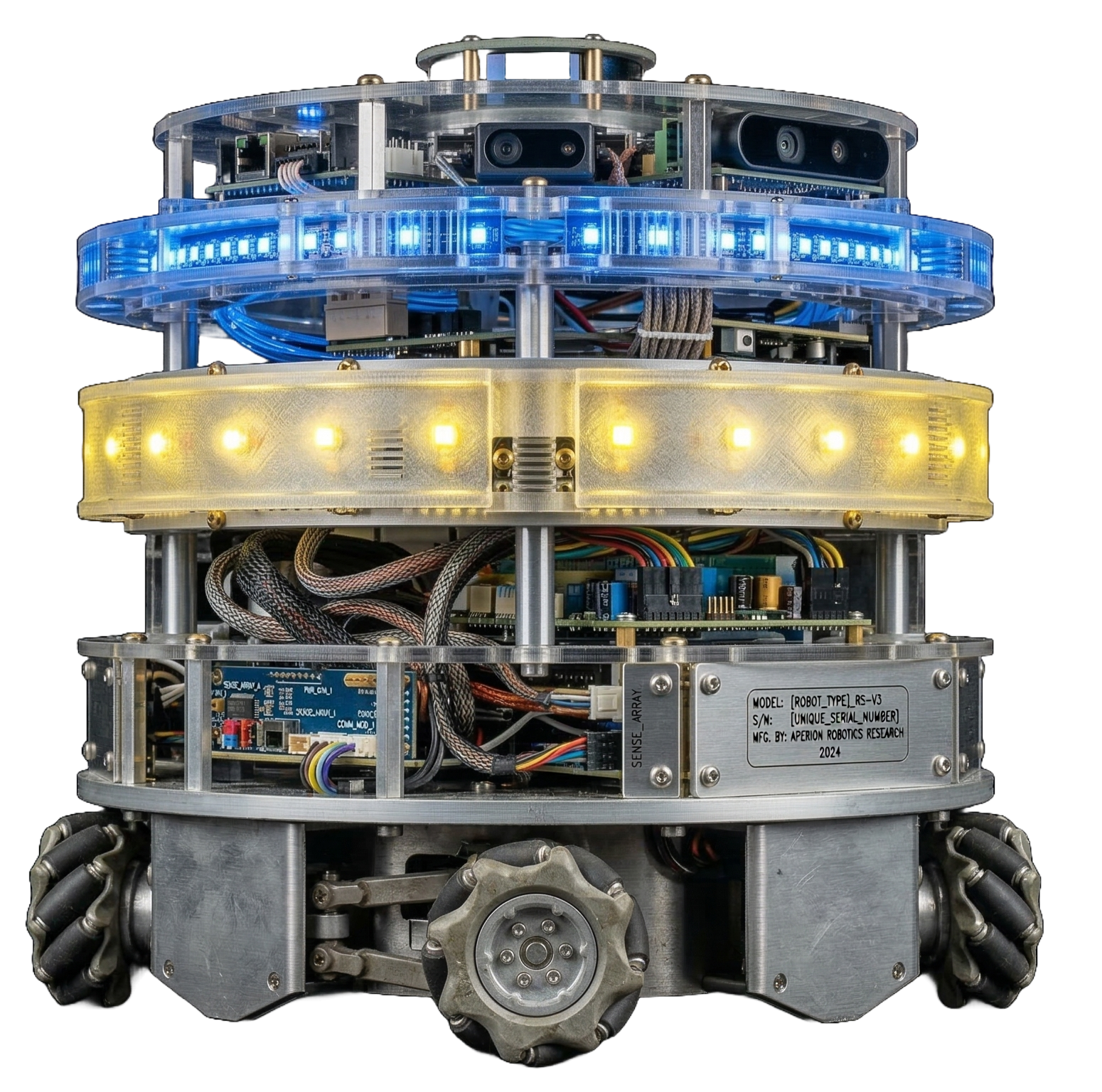
View of a Robot
Obstructed Visibility
The Mutual Visibility Problem
Goal: Move the robots so that no three robots are collinear, i.e., every pair of robots becomes mutually visible.
Initial Configuration
Target Configuration
-
Pattern Formation
-
Gathering
-
Leader Election in a group of robots
Collision is not Allowed
Collision: When two robots are located at the same time and the same place, they meet a collision.
Mutual Visibility does not allow collision.
Fault Model: Mobility Fault
Fault-Tolerant Mutual Visibility
Aim is to achieve mutual visibility among non-faulty robots.
No three non-faulty robots should be collinear
should not occur
No faulty robot should lie between two non-faulty robots
should not occur
Three Important Aspects
Mobility Fault
A faulty robot cannot move but still executes the algorithm and can change its light color.
Disorientation
No agreement on any coordinate axis — each robot has its own local frame.
Asynchrony
No notion of global time — any robot can be activated anytime under a fair scheduler.
Comparison with State-of-the-Art
| Paper | No. of Faults | Scheduler | Axes Agreement | Colors | Time Complexity |
|---|---|---|---|---|---|
| Sharma et al. | None | ASYNC | No | 47 | $O(1)$ |
| Aljohani & Sharma | 1 | SSYNC | Yes (both axes) | 3 | - |
| Poudel et al. | $f$ | SSYNC | Yes (one axis) | 2 | $O(N)$ |
| Poudel et al. | $f$ | ASYNC | Yes (one axis) | 3 | $O(N)$ |
| This Work (Ours) | $f$ | ASYNC | No | 26 | $O(N)$ |
Power of the Adversary
Challenges of Mobility Fault
Movements do not always solve the problem.
Challenges of Mobility Fault
Power of colors might still be insufficient if movements are not carefully planned.
Some Impossible Configurations
Symmetric configurations with faulty robot lying at the center of symmetry.
Careful Movements Required
Cannot move all robots together -- that might create new collinearity issues.
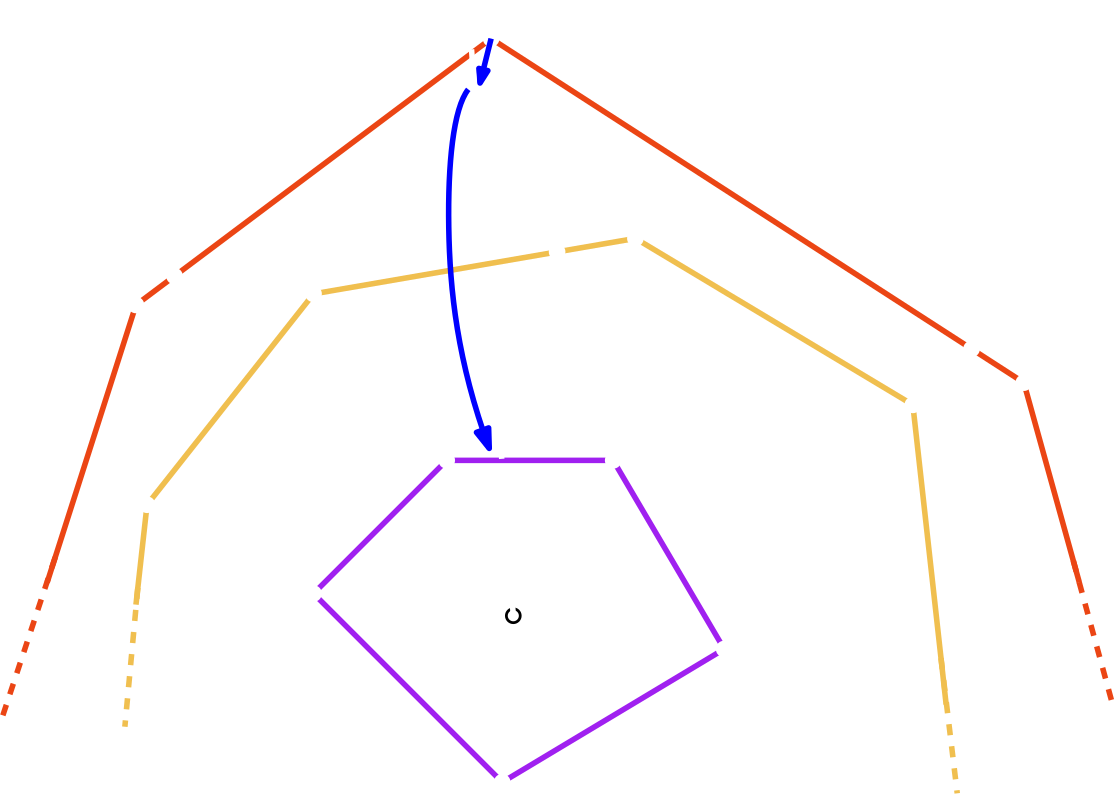
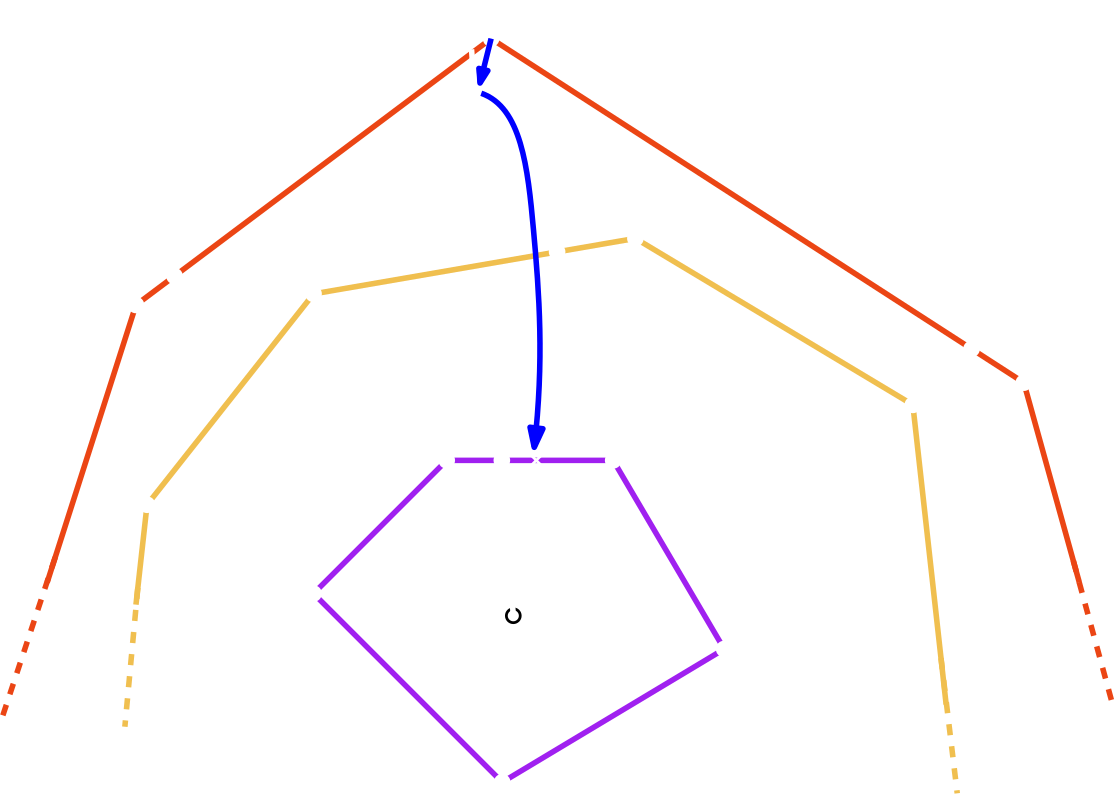
Disjoint Convex Layers
Outermost Layer $\mathcal{L}^1$
- Consider the convex hull of all robots.
- The boundary of this hull forms $\mathcal{L}^1$.
Layer $\mathcal{L}^j$
For \(j \geq 2\), layer \(\mathcal{L}^{j}\) is obtained recursively after removing all robots from \(\mathcal{L}^{1} \cup \cdots \cup \mathcal{L}^{j-1}\).
Innermost Layer $\mathcal{L}^k$
Corner, Boundary and Interior Robots
- Corner robots are the ones on the vertices of the convex hull.
- Boundary robots lie on sides connecting vertices of the convex hull.
- Interior robots lie strictly inside the convex hull.
Broader Strategy: Where to Move?
- Shall we move the (non-faulty) robots in the outward direction?
- No. Because, faulty robots may obstruct visibility and robots do not know $N$ and $f$.
Broader Strategy: Where to Move?
- A natural option is to move the non-faulty robots inward.
- Robots can form a new convex shape inside the innermost layer, leaving the faulty robots outside.
Innermost Layer Detection
(for problems like universal dancing)
Two Possibilities of Innermost Layer
Non-linear Innermost Layer
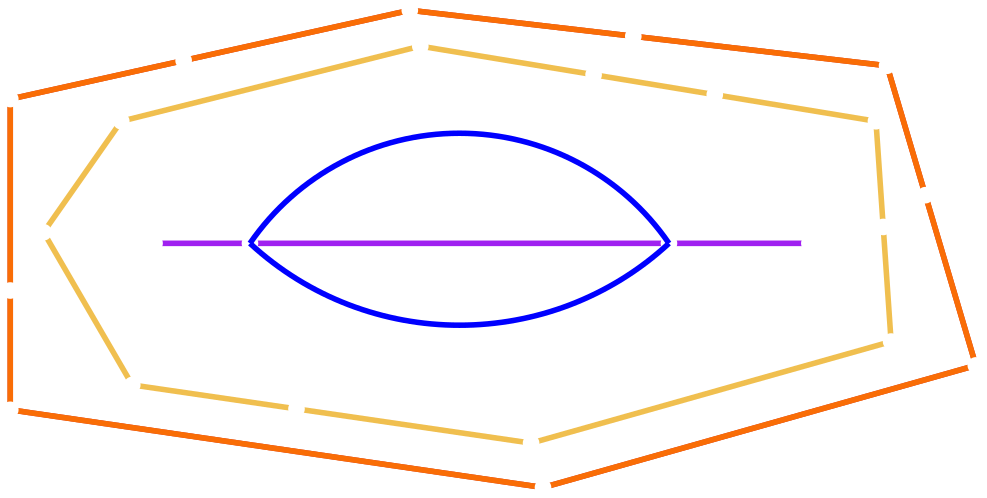
Linear Innermost Layer
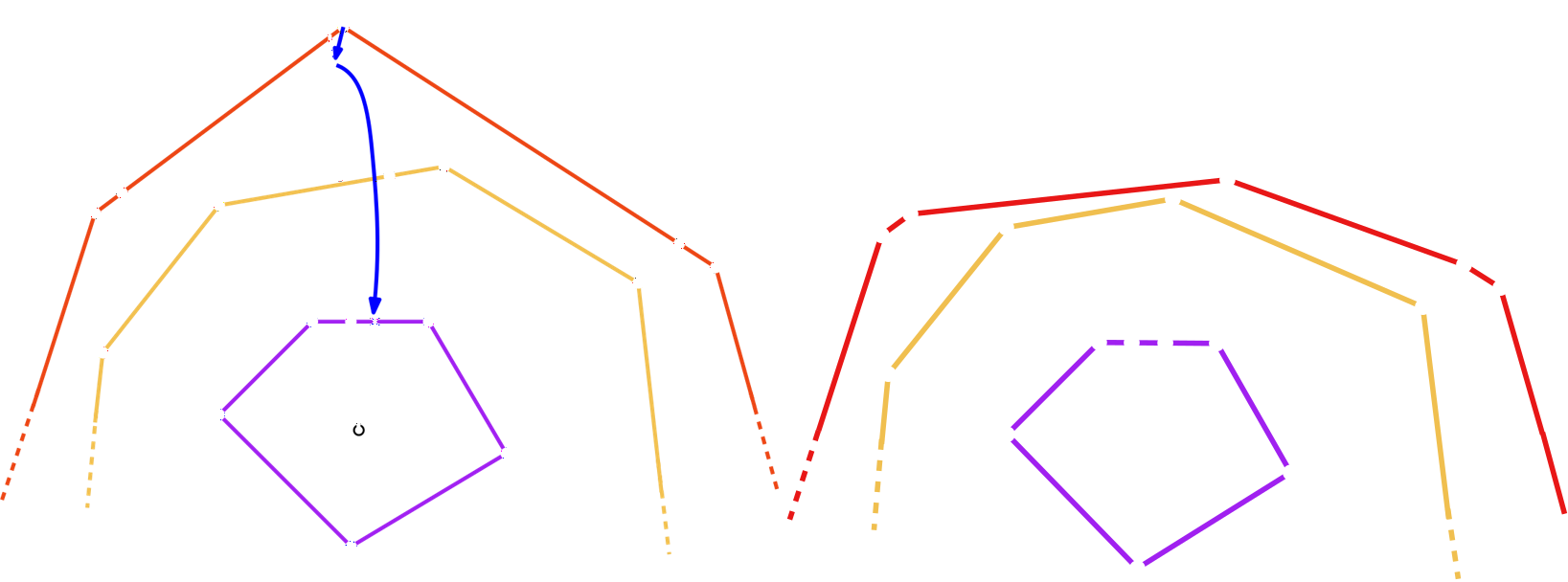
Our Aim: in Non-linear Case
Visible Area for a Robot
The visible area of a robot is the polygonal subregion of the plane from which the robot can see all stationary robots without obstruction.
Algorithm for Non-linear Case

Algorithm for Non-linear Case
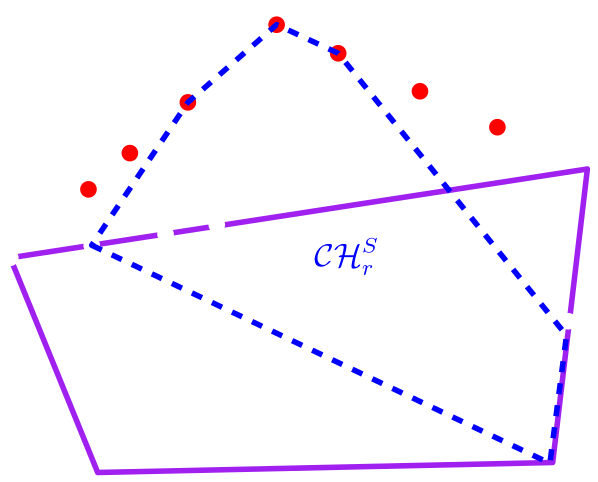
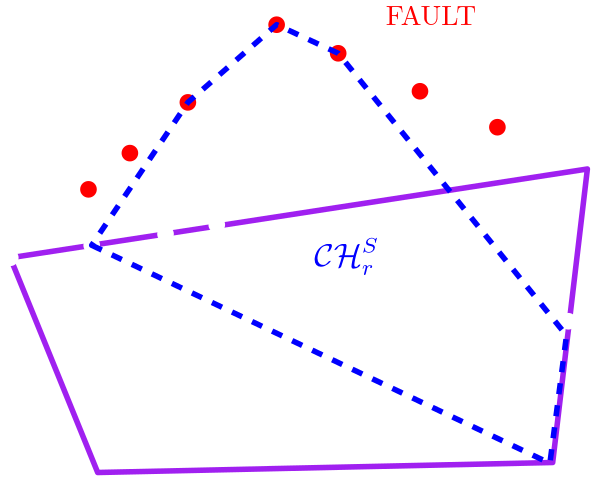
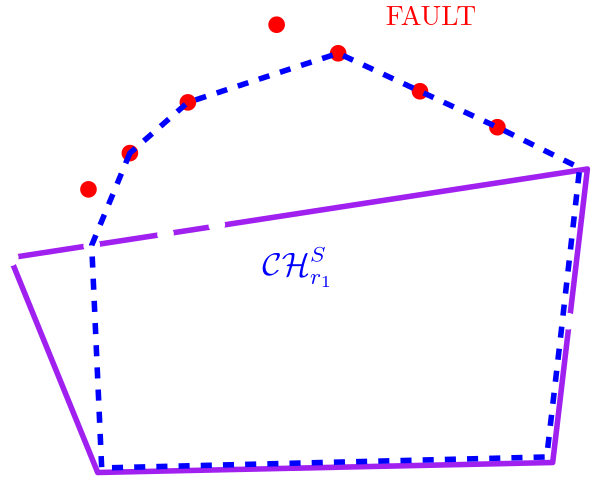
However, A Robot Might Be Faulty
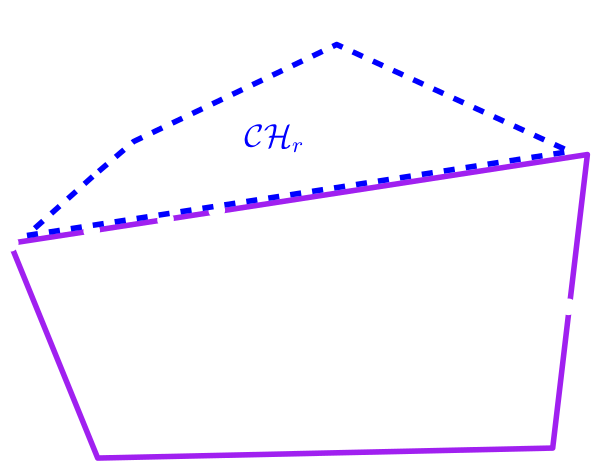
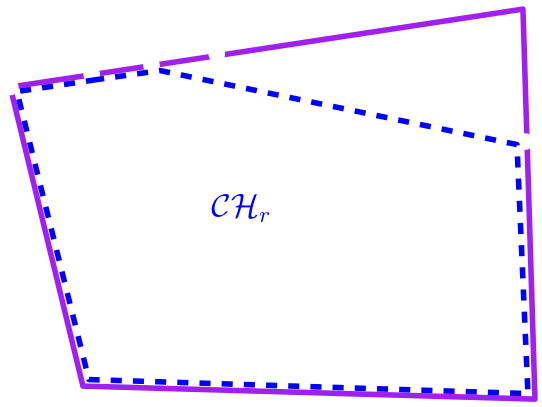
Fault Detection
$\mathcal{CH}_r^S$ = convex hull of the robots with colors in $S$ that are visible to $r$.
Movement From Innermost Layer
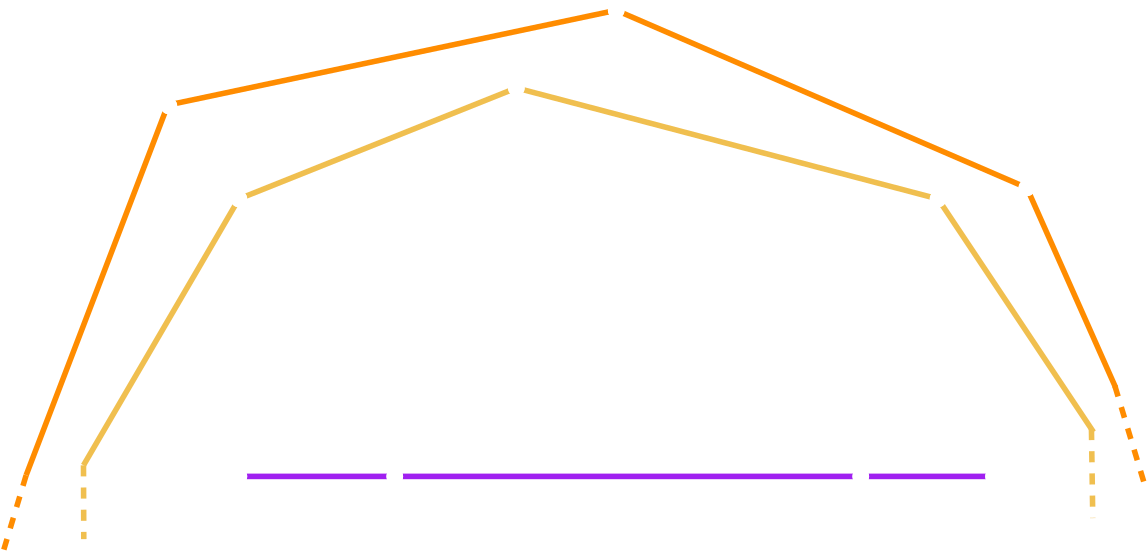
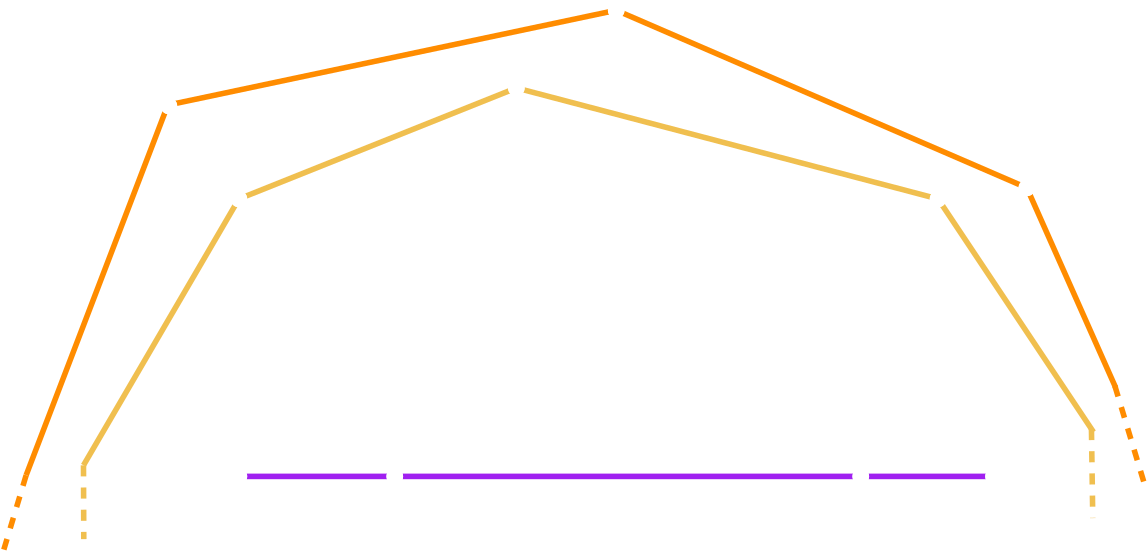
Algorithm for Linear Case
Algorithm for Linear Case
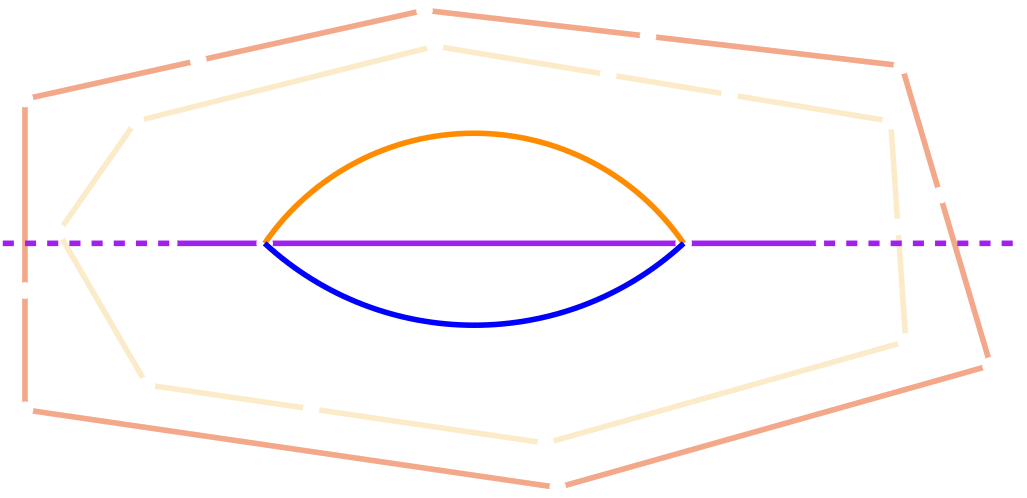
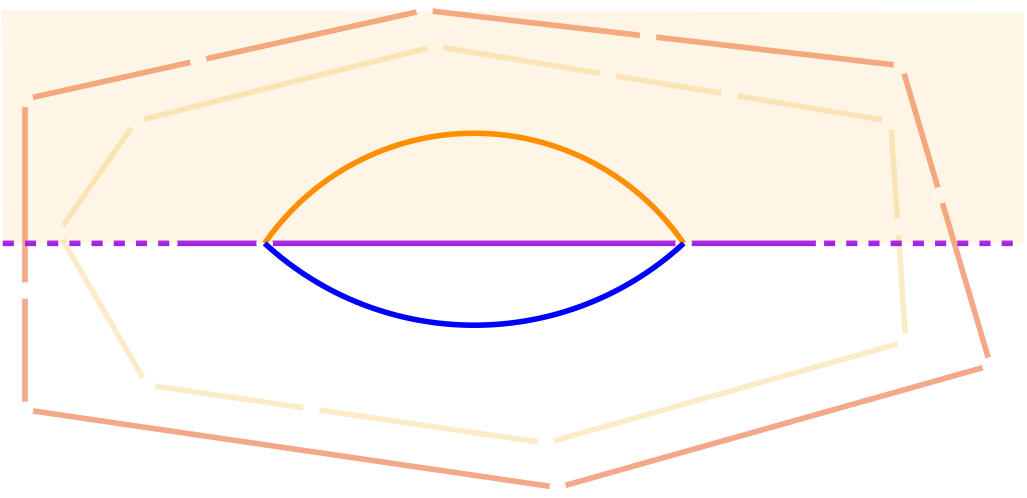
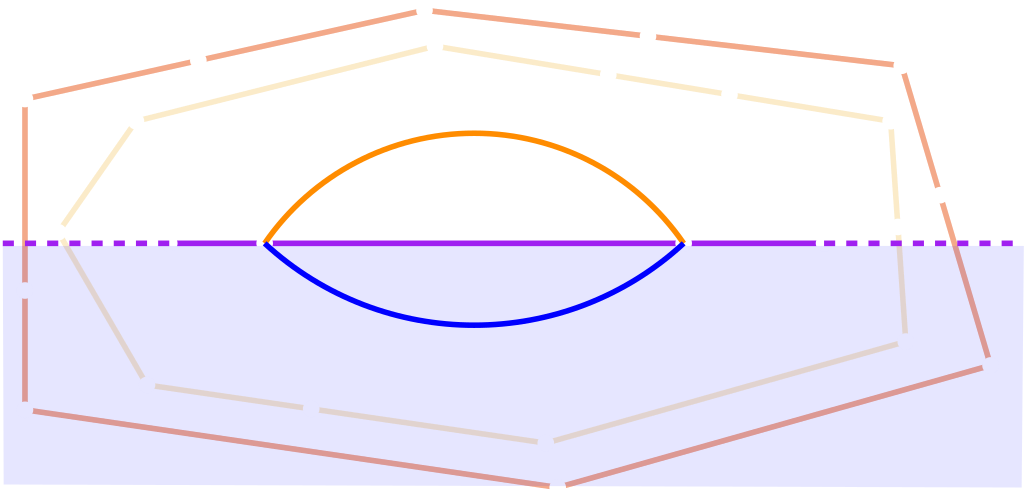
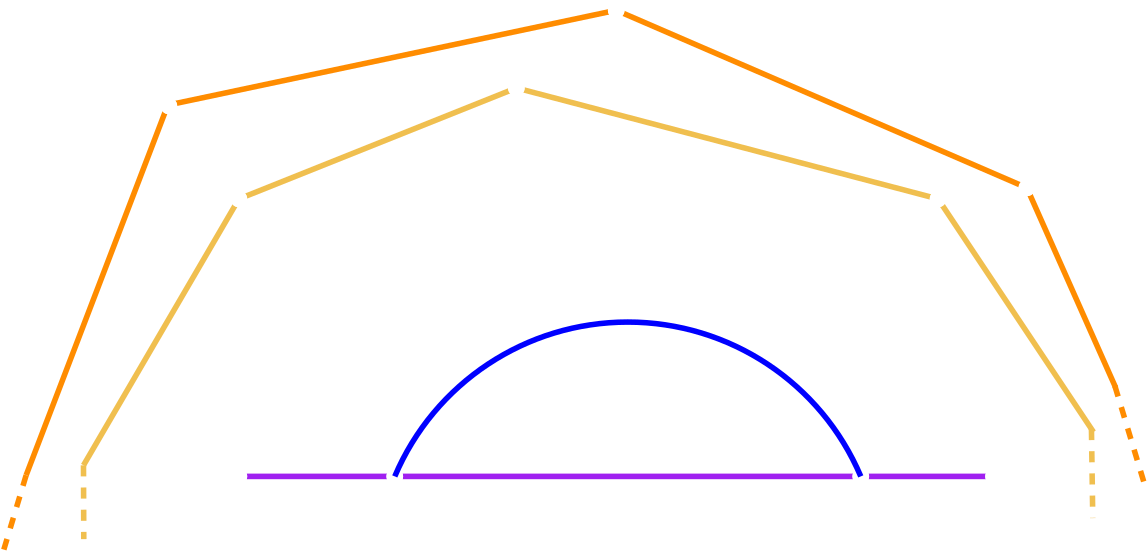
How to Determine the Half Ellipse?
- ① The central robots on the innermost layer to determine the major axis.
- ② Another robot to determine the minor axis and hence the ellipse.
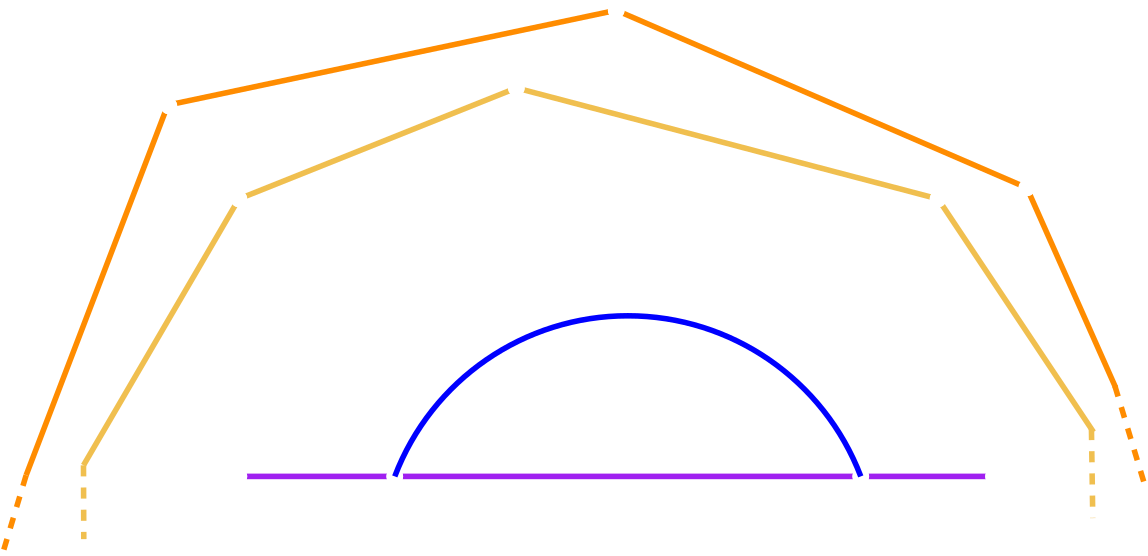
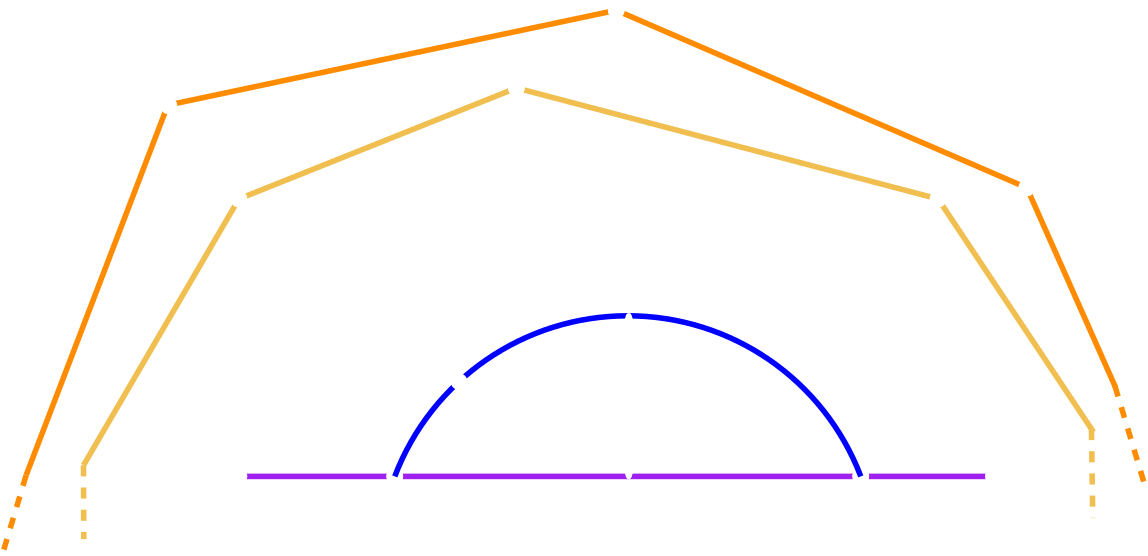
How to Determine the Half Ellipse?